RomanTesting a C-code with system callsExample of wrapping external calls with FFFJan 26, 2021Jan 26, 2021
RomanOn importance of unified toolingWhat does your typical work day as a (software) developer look like?Dec 28, 2020Dec 28, 2020
RomanReal-time kernel for NVIDIA AGX XavierIn this blog post i want to share a quick way (one command) of recompiling Linux kernel with PREEMPT_RT patch for NVIDIA Jetson AGX Xavier.Nov 15, 20191Nov 15, 20191
RomanConverting Neural Network To TensorRT . Part 2 Creating a Custom Layer.In part one i’ve described how to convert NN with supported operations.Jul 9, 20193Jul 9, 20193
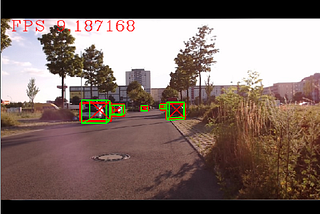
RomanConverting Neural Network To TensorRT . Part 1 Using Existing Plugins.TensorRT is a framework from NVIDIA that allows to significantly speed-up inference performance of neural network. TensorRT does this by…Jul 9, 20191Jul 9, 20191
RomanDEEP DIVE INTO TENSORFLOW EXAMPLE PARTIAL DIFFERENTIAL EQUATIONSThis post describes mathematics behind TensorFlow’s tutorial example “Partial differential equations”.Jan 5, 2019Jan 5, 2019